Example 1: Applying an automatic error detection algorithm to a time series
Created by Davíd Brakenhoff, Artesia, May 2020
This notebook contains a simple example how to set up an automatic error detection algorithm based on a few simple rules and applies those rules to a groundwater time series.
First import the requisite packages:
[1]:
import os
import numpy as np
import pandas as pd
import traval
from traval import rulelib as rlib
Data
Load the data. The following information is available:
The raw groundwater levels (with all the measurement errors still in the timeseries).
The manually validated timeseries (this is what we consider as the ‘truth’). Of course the manual validation isn’t always perfect, but since it’s all we have to compare with we’re using this as our ‘truth’. We assume our manual validation is good, so hopefully our error detection algorithm yields similar results to the manual validation.
The sensor level in meters relative to NAP, for checking whether the sensor is above the groundwater level.
The elevation of the top of the piezometer, for checking whether the groundwater level is above this level.
[2]:
datadir = "../data/"
raw = pd.read_csv(
os.path.join(datadir, "raw_series.csv"), index_col=[0], parse_dates=True
).squeeze()
truth = pd.read_csv(
os.path.join(datadir, "manual_validation_series.csv"),
index_col=[0],
parse_dates=True,
).squeeze()
truth.name = "manual validation"
sensor_level = pd.read_csv(
os.path.join(datadir, "sensor_level_nap.csv"), index_col=[0], parse_dates=True
).squeeze()
top_piezometer = pd.read_csv(
os.path.join(datadir, "top_piezometer_level.csv"), index_col=[0], parse_dates=True
).squeeze()
The error detection algorithm and the RuleSet object
The detection algorithm consists of 3 checks and an extra step to combine the results of those three checks:
Check for spikes (when groundwater level suddenly changes and returns to its original level one timestep later).
Check if sensor is above groundwater level.
Check if groundwater level is above top of piezometer (if the piezometer is closed this is possible, but in this case we know it isn’t).
Combine the results of checks 1 to 3 to yield the final result.
The error detection algorithm is entered using the RuleSet object. This is an object that can hold any number of error detection rules and apply those to a timeseries. With the RuleSet.add_rule() method, rules can be added to the algorithm. Ading a rule requires the following input:
name: name of the rule (user-specified)
func: the function to apply to the timeseries
apply_to: an integer indicating to which timeseries the rule should be applied. The original timeseries is 0, the outcome from step 1 is 1, etc.
kwargs: a dictionary containing any other arguments required by the functions that are passed.
The final rule we add doesn’t check for errors but combines the results from the previous three steps to create one final timeseries that includes the outcome from each of the preceding rules. In this case apply_to is a tuple of ints referencing the results that should be combined. In this case it says to combine the results from steps 1, 2 and 3.
[3]:
# initialize RuleSet object
rset = traval.RuleSet(name="basic")
# add rules
rset.add_rule(
"spikes",
rlib.rule_spike_detection,
apply_to=0,
kwargs={"threshold": 0.15, "spike_tol": 0.15, "max_gap": "7D"},
)
rset.add_rule(
"dry",
rlib.rule_ufunc_threshold,
apply_to=0,
kwargs={"ufunc": (np.less,), "threshold": sensor_level, "offset": 0.025},
)
rset.add_rule(
"hardmax",
rlib.rule_ufunc_threshold,
apply_to=0,
kwargs={"ufunc": (np.greater,), "threshold": top_piezometer},
)
rset.add_rule("combine", rlib.rule_combine_nan_or, apply_to=(1, 2, 3))
The view of the object shows which rules have been added:
[4]:
# view object
rset
[4]:
RuleSet: 'basic'
step: name apply_to
1: spikes 0
2: dry 0
3: hardmax 0
4: combine (1, 2, 3)
The RuleSet object can be stored as pickle file or as JSON.
to_pickle: This option has full support for custom functions and is the most flexible and is therefore recommended. The file is not human readable however.to_json: Storing as a JSON file has the advantage of creating a human readable file, but it only supports default functions fromtraval.rulelib. So custom functions will not be preserved when saving in this format.
[5]:
rset.to_pickle("test.pkl")
rset2 = traval.RuleSet.from_pickle("test.pkl")
RuleSet written to file: 'test.pkl'
[6]:
rset.to_json("test.json")
rset3 = traval.RuleSet.from_json("test.json")
RuleSet written to file: 'test.json'
Delete the two files we just created.
[7]:
for f in ["test.json", "test.pkl"]:
os.remove(f)
The Detector object
The Detector object provides tools for storing a timeseries, applying an algorithm built with the RuleSet object and processing the outcomes. We initialize the objet with the raw data timeseries in which we want to find the erroneous measurements. Optionally we can add a “truth” series to compare the outcome of our error detection algorithm to.
[8]:
detector = traval.Detector(raw, truth=truth)
detector
[8]:
Detector: <DEUR033_G>
Apply our custom algorithm. The compare=True creates SeriesComparison objects for the result of each step in the algorithm. These objects compare the result of a error detection step with the original timeseries or the ‘truth’ if available. The object also includes methods to plot the comparison results.
[9]:
detector.apply_ruleset(rset, compare=True)
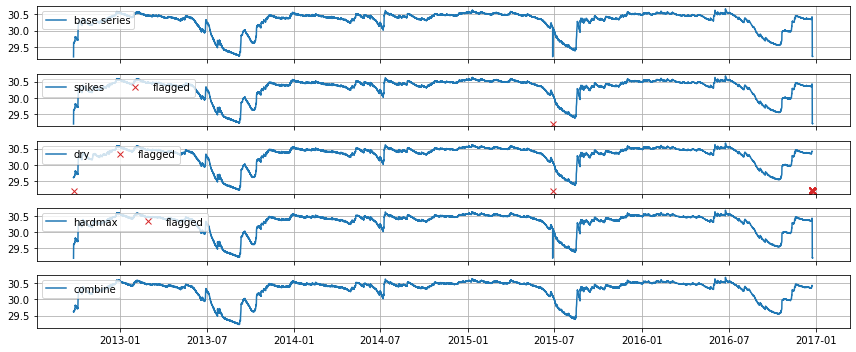
Plot an overview of the results. This creates one plot per rule and highlights which points were marked as suspect based on that rule.
[10]:
axes = detector.plot_overview()
The results with the flagged values as NaNs in the original series can be obtained with detector.get_results_dataframe().
[11]:
results = detector.get_results_dataframe()
results.head()
[11]:
| base series | spikes | dry | hardmax | combine | |
|---|---|---|---|---|---|
| index | |||||
| 2012-09-24 15:00:00 | 29.1959 | 29.1959 | NaN | 29.1959 | NaN |
| 2012-09-24 16:00:00 | 29.6104 | 29.6104 | 29.6104 | 29.6104 | 29.6104 |
| 2012-09-24 17:00:00 | 29.6082 | 29.6082 | 29.6082 | 29.6082 | 29.6082 |
| 2012-09-24 18:00:00 | 29.6170 | 29.6170 | 29.6170 | 29.6170 | 29.6170 |
| 2012-09-24 19:00:00 | 29.6158 | 29.6158 | 29.6158 | 29.6158 | 29.6158 |
The corrections are only stored for timestamps where corrections were deemed relevant.
[27]:
corrections = detector.get_corrections_dataframe(as_correction_codes=True)
corrections
[27]:
| spikes | dry | hardmax | combine | |
|---|---|---|---|---|
| 2015-06-27 14:30:41 | 99 | -2 | 0 | 0 |
| 2012-09-24 15:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 10:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 11:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 12:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 13:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 14:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 15:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 16:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 17:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 18:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 19:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 20:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 21:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 22:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-23 23:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 00:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 01:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 02:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 03:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 04:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 05:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 06:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 07:00:00 | 0 | -2 | 0 | 0 |
| 2016-12-24 08:00:00 | 0 | -2 | 0 | 0 |
Getting the status code names is more informative and can be done with traval.ts_utils.get_correction_status_name. Note that NaNs mean that a specific rule did not flag that particular observation as suspect. The status codes and their meanings can be derived from traval.ts_utils.CorrectionCode:
[13]:
list(traval.ts_utils.CorrectionCode)
[13]:
[<CorrectionCode.NO_CORRECTION: 0>,
<CorrectionCode.BELOW_THRESHOLD: -2>,
<CorrectionCode.NOT_EQUAL_VALUE: -1>,
<CorrectionCode.EQUAL_VALUE: 1>,
<CorrectionCode.ABOVE_THRESHOLD: 2>,
<CorrectionCode.MODIFIED_VALUE: 4>,
<CorrectionCode.UNKNOWN_COMPARISON_VALUE: 99>]
[14]:
traval.ts_utils.get_correction_status_name(corrections)
[14]:
| spikes | dry | hardmax | combine | |
|---|---|---|---|---|
| 2015-06-27 14:30:41 | UNKNOWN_COMPARISON_VALUE | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2012-09-24 15:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 10:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 11:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 12:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 13:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 14:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 15:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 16:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 17:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 18:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 19:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 20:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 21:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 22:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-23 23:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 00:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 01:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 02:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 03:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 04:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 05:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 06:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 07:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
| 2016-12-24 08:00:00 | NO_CORRECTION | BELOW_THRESHOLD | NO_CORRECTION | NO_CORRECTION |
The comparison objects are stored as a dictionary under detector.comparisons:
[15]:
detect = detector
[16]:
detect.comparisons
[16]:
{1: <traval.ts_comparison.SeriesComparisonRelative at 0x7fc95e7b9a80>,
2: <traval.ts_comparison.SeriesComparisonRelative at 0x7fc95e7b90f0>,
3: <traval.ts_comparison.SeriesComparisonRelative at 0x7fc95e7d4040>,
4: <traval.ts_comparison.SeriesComparisonRelative at 0x7fc95e7d64a0>}
Let’s take a look at the comparison of the final result with manual validation, relative to the raw data.
[17]:
comp = detector.comparisons[4]
The SeriesComparisonRelative object contains a summary of the different categories measurements can fall into, e.g. “kept in both” means the observations was deemed valid in both the detection result and the “truth” timeseries.
[18]:
comp.summary_base_comparison
[18]:
kept_in_both 37212.0
flagged_in_s1 0.0
flagged_in_s2 0.0
flagged_in_both 25.0
in_all_nan 0.0
introduced_in_s1 0.0
introduced_in_s2 0.0
introduced_in_both 0.0
Name: N_obs, dtype: float64
Plot the comparison overview. In this comparison the manual validation and the result of our error detection algorithm are compared to each other relative to the raw data. In this case we can see that all the points that were marked as suspect in the manual validation were also identified by our algorithm.
[19]:
ax = comp.plots.plot_relative_comparison(mark_different=False, mark_identical=False)
leg = ax.legend(loc=(0, 1), ncol=4)

Binary Classification statistics and the confusion matrix
All methods for calculating statistics related to binary classification are available through the comp.bc attribute.
[20]:
?comp.bc
Type: BinaryClassifier
String form: <traval.binary_classifier.BinaryClassifier object at 0x7fc95e7d7f40>
File: ~/github/traval/traval/binary_classifier.py
Docstring: Class for calculating binary classification statistics.
Init docstring:
Initialize class for calculating binary classification statistics.
Parameters
----------
tp : int
number of True Positives (TP)
fp : int
number of False Positives (FP)
tn : int
number of True Negatives (TN)
fn : int
number of False Negatives (FN)
The comp.bc.confustion_matrix method is used to calculate the confusion matrix. The number of times the algorithm is correct (as compared to the “truth”) is given on the diagonal. The number of times the algorithm is wrong is shown outside the diagonal.
[21]:
?comp.bc.confusion_matrix
Signature: comp.bc.confusion_matrix(as_array=False)
Docstring:
Calculate confusion matrix.
Confusion matrix shows the performance of the algorithm given a
certain truth. An abstract example of the confusion matrix:
| Algorithm |
|-------------------|
| error | correct |
------|---------|---------|---------|
| error | TP | FN |
Truth |---------|---------|---------|
| correct | FP | TN |
------|---------|---------|---------|
where:
- TP: True Positives = errors correctly detected by algorithm
- TN: True Negatives = correct values correctly not flagged by algorithm
- FP: False Positives = correct values marked as errors by algorithm
- FN: False Negatives = errors not detected by algorithm
Parameters
----------
as_array : bool, optional
return data as array instead of DataFrame, by default False
Returns
-------
data : pd.DataFrame or np.array
confusion matrix
File: ~/github/traval/traval/binary_classifier.py
Type: method
[22]:
cmat = comp.bc.confusion_matrix()
cmat
[22]:
| Algorithm | |||
|---|---|---|---|
| error | correct | ||
| "Truth" | error | 25 | 0 |
| correct | 0 | 37212 | |
Binary classification statistics are also available:
sensitivity or true positive rate: number of positives identified relative to total number of positives. This says something about the avoidance of false negatives.
specificity or true negative rate: number of negatives identified relative to total number of negatives. This says something about the avoidance of false positives.
false positive rate: (= 1 - specificity)
false negative rate: (= 1 - sensitivity)
More explanation is available in de docstrings of these properties:
[23]:
?comp.bc.specificity
Type: property
String form: <property object at 0x7fc96adbb920>
Docstring:
Specificity or True Negative Rate.
Statistic describing ratio of true negatives identified,
which also says something about the avoidance of false positives.
Specificity = TN / (TN + FP)
where
- TN : True Negatives
- FP : False Positives
[24]:
print(
f"- True Positive Rate = {comp.bc.true_positive_rate} = "
f" Sensitivity = {comp.bc.sensitivity}"
)
print(
f"- True Negative Rate = {comp.bc.true_negative_rate} = "
f" Specificity = {comp.bc.specificity}"
)
print(
f"- False Positive Rate = {comp.bc.false_positive_rate} = "
f"(1 - Specificity) = {1 - comp.bc.specificity}"
)
print(
f"- False Negative Rate = {comp.bc.false_negative_rate} = "
f"(1 - Sensitivity) = {1 - comp.bc.sensitivity}"
)
- True Positive Rate = 1.0 = Sensitivity = 1.0
- True Negative Rate = 1.0 = Specificity = 1.0
- False Positive Rate = 0.0 = (1 - Specificity) = 0.0
- False Negative Rate = 0.0 = (1 - Sensitivity) = 0.0
Matthews Correlation Coefficient (MCC)
The MCC is seen as a balanced measure for classification that also works when classes have very different sizes. It is essentially a measure between -1 and 1 that attempts to summarize the confusion matrix in one value. A coefficient of +1 represents a perfect prediction, 0 no better than random prediction and −1 indicates total disagreement between prediction and observation. Though there is no perfect way of summarizing the confusion matrix in one measure, the MCC is seen as one of the best of such measures (Source: Wikipedia).
[25]:
comp.bc.mcc
[25]:
1.0
Receiver Operator Characteristic plot
Finally, we can plot the so-called “receiver operator characteristic curve”, which shows the performance of our algorithm relative to the line corresponding to a random guess. The plot shows the False Positive Rate versus the True Positive Rate. The higher the True Positive Rate the better our algorithm is able to identify errors. The lower the False Positive Rate, the lower the number of False Positives it yields. The perfect score is therefore the top left corner of the plot.
Our algorithm scores perfectly in this example.
[26]:
label = "my first error \ndetection algorithm"
ax = traval.plots.roc_plot(
comp.bc.true_positive_rate, comp.bc.false_positive_rate, labels=label
)
ax.axis([-0.01, 1.01, -0.01, 1.01])
ax.legend(loc="lower right");

[ ]: