Example 2: Applying an error detection algorithm to a full dataset
Created by Davíd Brakenhoff, Artesia, May 2020
Use Aa en Maas divers dataset consisting of 484 piezometers to test new traval module.
Requires pystore
Requires hydropandas
Requires data in pystore format as prepared by scripts in the
traval_datamodule
[1]:
import hydropandas as hpd
import matplotlib.pyplot as plt
import numpy as np
import pystore
from tqdm.notebook import tqdm
import traval
from traval import rulelib as rlib
Load data
[2]:
pystore_path = "/home/david/Github/traval-data/extracted_data/pystore"
pystore_name = "aaenmaas"
[3]:
items = ["GW.meting.ruw"]
raw_obs = hpd.ObsCollection.from_pystore(
pystore_name,
pystore_path,
collection_names=None,
item_names=items,
nameby="collection",
read_series=True,
verbose=False,
progressbar=True,
)
items = ["GW.meting.totaalcorrectie"]
val_obs = hpd.ObsCollection.from_pystore(
pystore_name,
pystore_path,
collection_names=None,
item_names=items,
nameby="collection",
read_series=True,
verbose=False,
progressbar=True,
)
100%|██████████| 484/484 [00:11<00:00, 42.06it/s]
100%|██████████| 484/484 [00:17<00:00, 27.88it/s]
Helper functions for obtaining additional timeseries
[4]:
pystore.set_path(pystore_path)
store = pystore.store(pystore_name)
def get_mph_series(name):
"""Get piezometer height from pystore."""
coll = store.collection(name)
meetpuntNAP_df = coll.item("Meetpunt.hoogte").to_pandas()
return meetpuntNAP_df.value
def get_threshold_series(name):
"""Get level below which sensor is dry from pystore."""
coll = store.collection(name)
inhangdiepte_df = coll.item("Inhang.diepte").to_pandas()
# inhangdiepte = inhangdiepte_df.value.iloc[0]
meetpuntNAP_df = coll.item("Meetpunt.hoogte").to_pandas()
# meetpuntNAP = meetpuntNAP_df.value.iloc[0]
threshold_series = meetpuntNAP_df.value - inhangdiepte_df.value
return threshold_series
Define error detection algorithm
BASIC method from TRAVAL study.
[6]:
# initialize RuleSet object
rset = traval.RuleSet(name="basic")
# add rules
rset.add_rule(
"spikes",
rlib.rule_spike_detection,
apply_to=0,
kwargs={"threshold": 0.15, "spike_tol": 0.15, "max_gap": "7D"},
)
rset.add_rule(
"dry",
rlib.rule_ufunc_threshold,
apply_to=0,
kwargs={"ufunc": (np.less,), "threshold": get_threshold_series, "offset": 0.05},
)
rset.add_rule(
"hardmax",
rlib.rule_ufunc_threshold,
apply_to=0,
kwargs={"ufunc": (np.greater,), "threshold": get_mph_series},
)
rset.add_rule("combine", rlib.rule_combine_nan_or, apply_to=(1, 2, 3))
# view object
rset
[6]:
RuleSet: 'basic'
step: name apply_to
1: spikes 0
2: dry 0
3: hardmax 0
4: combine (1, 2, 3)
Error detection
Do some pre-processing on timeseries prior to running error detection:
Create synthetic raw timeseries (remove unlabeled adjustments to timeseries)
Ensure all labeled errors are set to np.nan in truth series (this means they are counted as erroneous observations).
Recategorize some comments.
[7]:
dlist = {}
for name in tqdm(raw_obs.index.intersection(val_obs.index)):
# get raw data
raw = raw_obs.loc[name, "obs"]["value"]
raw.name = name
# get truth
truth = val_obs.loc[name, "obs"].loc[:, ["value", "comment"]]
# set all commented data to np.NaN
truth.loc[truth.comment != "", "value"] = np.nan
truth.loc[truth.comment == "vorst", "comment"] = "onbetrouwbare meting"
# rename columns
truth.columns = ["manual validation", "comment"]
# create synthetic raw (only keeps values for labeled changes)
synth_raw = traval.ts_utils.create_synthetic_raw_timeseries(
raw, truth["manual validation"], truth["comment"]
)
synth_raw.name = name
# create detector object and apply algorithm
detector = traval.Detector(synth_raw, truth=truth)
detector.apply_ruleset(rset, compare=[-1])
# store object
dlist[name] = detector
Calculate statistics
For full dataset and for individual timeseries
[8]:
fpr = []
tpr = []
# initialize empty BinaryClassifier
bc_sum = traval.BinaryClassifier(0, 0, 0, 0)
for _, dct in dlist.items():
# get TPR and FPR
itpr = dct.comparisons[4].bc.true_positive_rate
ifpr = dct.comparisons[4].bc.false_positive_rate
tpr.append(itpr)
fpr.append(ifpr)
# add binary classification result,
# the '+' is overloaded to allow adding of the two
bc_sum = bc_sum + dct.comparisons[4].bc
Calculate confusion matrix for full dataset.
[9]:
bc_sum.confusion_matrix?
Signature: bc_sum.confusion_matrix(as_array=False)
Docstring:
Calculate confusion matrix.
Confusion matrix shows the performance of the algorithm given a
certain truth. An abstract example of the confusion matrix:
| Algorithm |
|-------------------|
| error | correct |
------|---------|---------|---------|
| error | TP | FN |
Truth |---------|---------|---------|
| correct | FP | TN |
------|---------|---------|---------|
where:
- TP: True Positives = errors correctly detected by algorithm
- TN: True Negatives = correct values correctly not flagged by algorithm
- FP: False Positives = correct values marked as errors by algorithm
- FN: False Negatives = errors not detected by algorithm
Parameters
----------
as_array : bool, optional
return data as array instead of DataFrame, by default False
Returns
-------
data : pd.DataFrame or np.array
confusion matrix
File: ~/Github/traval/traval/binary_classifier.py
Type: method
The confusion matrix summarizes the performance of the algorithm. The diagonal entries show in how many cases the algorithm was correct in identifying errors or correct measurements, as compared to the “truth”: the manually validated timeseries. The off-diagonal entries show the cases where the algorithm was incorrect, either by erroneously classifying a good measurement as an error, or not identifying an erroneous measurement.
[10]:
bc_sum.confusion_matrix()
[10]:
| Algorithm | |||
|---|---|---|---|
| error | correct | ||
| "Truth" | error | 442444 | 411828 |
| correct | 319029 | 24651161 | |
ROC-plot
The receiver-operator characteristic plot shows the performance of the algorithm relative to the line representing a random guess.
The x-axis shows the False Positive Rate (FPR), which says something about how many false positives occur on a scale from 0.0 to 1.0. E.g. at an FPR of 25% it means that 75% of true negatives are correctly not flagged as suspect, which in turn, means that 25% are marked as suspect and represent False Positives.
The y-axis shows the True Positive Rate or Sensitivity which says something about how many erroroneous observations are correctly identified on a scale from 0.0 to 1.0.
The perfect score is the top-left corner, which indicates that 100% of values are correctly classified, and there are 0% False Positives. Values on the black diagonal dotted line are no better than a random guess. Values below the black dotted line indicate that the inverse of classification of the algorithm is better at classifying measurements than its current implementation.
Each blue dot represents the algorithm score for a single timeseries. The orange dot is the performance of the algorithm for the whole dataset. The plot shows that the False Positive rate is generally quite low, but that there is a significant spread in the Sensitivity. On average, about 50% of erroneous measurements are correctly identified.
[12]:
ax = traval.plots.roc_plot(
[np.array(tpr)], [np.array(fpr)], labels=["BASIC: individual"]
)
traval.plots.roc_plot(
bc_sum.true_positive_rate,
bc_sum.false_positive_rate,
labels="BASIC: full dataset",
ax=ax,
plot_diagonal=False,
)
[12]:
<AxesSubplot:title={'center':'receiver operator characteristic plot'}, xlabel='False Positive Rate (1-specificity)', ylabel='True Positive Rate (sensitivity)'>
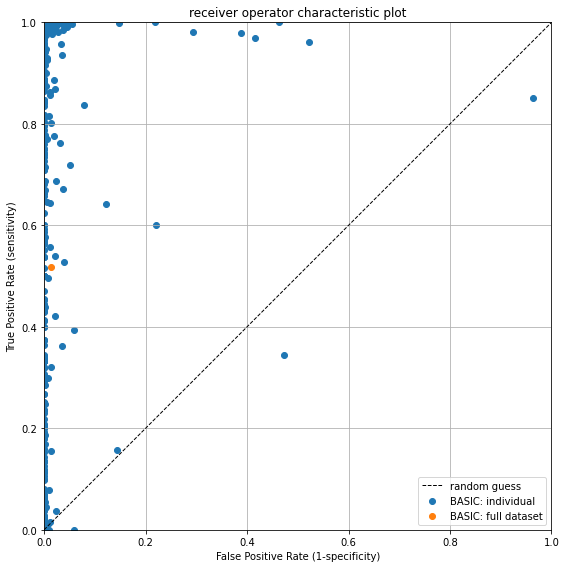
If we check the True Positive Rate we see that it is indeed about 50%:
[13]:
bc_sum.true_positive_rate
[13]:
0.517919351213665
Matthews Correlation Coefficient (MCC) for the full dataset.
The MCC is seen as a balanced measure for classification that also works when classes have very different sizes. It is essentially a measure between -1 and 1 that attempts to summarize the confusion matrix in one value. A coefficient of +1 represents a perfect prediction, 0 no better than random prediction and −1 indicates total disagreement between prediction and observation. Though there is no perfect way of summarizing the confusion matrix in one measure, the MCC is seen as one of the best of such measures (Source: Wikipedia).
[14]:
bc_sum.mcc
[14]:
0.5340471787404938
Get statistics per comment
[15]:
summ = None
for d in tqdm(dlist.values()):
if summ is None:
summ = d.comparisons[4].compare_to_base_by_comment()
else:
summ = summ.add(d.comparisons[4].compare_to_base_by_comment(), fill_value=0.0)
[16]:
summ = summ.dropna(how="all", axis=0)
summ
[16]:
| drift logger | droog | foute meting | inhang | lucht | onbetrouwbare meting | piek | ||
|---|---|---|---|---|---|---|---|---|
| kept_in_both | 24651161.0 | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| flagged_in_s1 | 319029.0 | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| flagged_in_s2 | NaN | 299331.0 | 24234.0 | 21559.0 | 9111.0 | 3361.0 | 48017.0 | 6215.0 |
| flagged_in_both | NaN | 31367.0 | 303194.0 | 23006.0 | 34652.0 | 15343.0 | 24959.0 | 9923.0 |
[17]:
ratio = summ / summ.sum()
ratio
[17]:
| drift logger | droog | foute meting | inhang | lucht | onbetrouwbare meting | piek | ||
|---|---|---|---|---|---|---|---|---|
| kept_in_both | 0.987224 | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| flagged_in_s1 | 0.012776 | NaN | NaN | NaN | NaN | NaN | NaN | NaN |
| flagged_in_s2 | NaN | 0.905149 | 0.074013 | 0.483765 | 0.20819 | 0.179694 | 0.657983 | 0.385116 |
| flagged_in_both | NaN | 0.094851 | 0.925987 | 0.516235 | 0.79181 | 0.820306 | 0.342017 | 0.614884 |
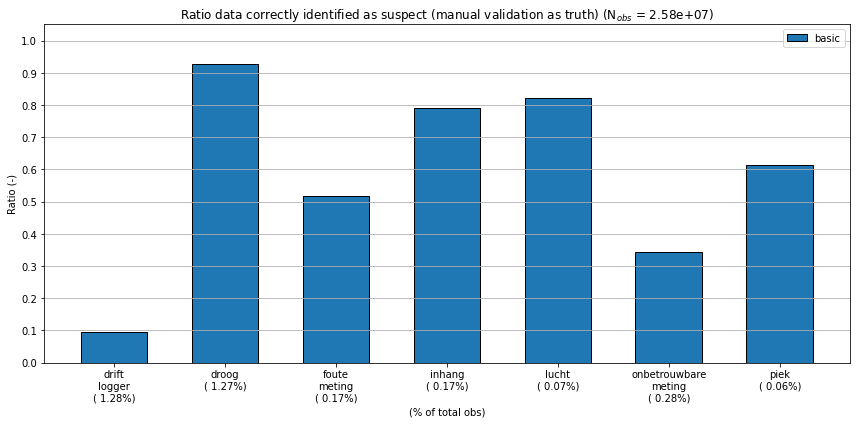
Plot barchart showing error detection rate per comment.
[18]:
lbls = list(
(
ratio.columns.str.replace(" ", "\n")
+ summ.sum().apply(lambda s: "\n({0:>6.2%})".format(s / bc_sum.n_obs))
).values
)
# create figure
fig, ax = plt.subplots(1, 1, figsize=(12, 6))
bar = ax.bar(
range(ratio.columns.size),
ratio.loc["flagged_in_both"].values,
align="center",
width=0.6,
edgecolor="k",
label=rset.name,
)
ax.set_xticklabels(lbls)
ax.set_yticks(np.arange(0, 1.1, 0.1))
ax.set_ylabel("Ratio (-)")
ax.grid(True, axis="y")
ax.legend(loc="upper right")
ax.set_title(
"Ratio data correctly identified as suspect "
"(manual validation as truth) "
"(N$_{{obs}}$ = {0:5.2e})".format(summ.sum().sum())
)
plt.xticks(rotation=0, ha="center")
ax.set_ylim(0, 1.05)
ax.set_xlabel("(% of total obs)")
fig.tight_layout()
/home/david/anaconda3/lib/python3.7/site-packages/ipykernel_launcher.py:10: UserWarning: FixedFormatter should only be used together with FixedLocator
# Remove the CWD from sys.path while we load stuff.
[ ]: